আসসালামু আলাইকুম,
আমরা অনেকেই এখন প্রোডাক্ট রিভিউ টাইম ল্যাপস ইত্যাদি কারণে ক্যামেরা স্লাইডার ব্যবহার করে থাকি যা বিভিন্ন দামের হয়ে থাকে, তবে motorized ক্যামেরার স্লাইডারের দাম অনেক হয়ে থাকে সাধারণ গুলোর চাইতে যা অনেকের ই সাধ্যের বাইরে । তাই আজ এমন একটি প্রজেক্ট দেখানো হবে যাতে সাধারণ ক্যামেরার স্লাইডার কে motorized করা হবে। এর জন্য যে সব কম্পোনেন্ট দরকার হবে তা একটু কষ্টে বাংলাদেশে পাওয়া গেলেও aliexpress থেকে আনতে পারলে অনেক খরচ কম হবে।
প্রথমেই কম্পোনেন্টের লিস্ট
১. ২টি টাইমার পুলি ।
২. ১টি টাইমার ফিতা।
৩. ২টি Limit switch
৪. ৩টি Lever switch
৫. ১টি J4218HB2401 42 Stepper Motor
৬. ১টি A4988 Stepper Motor Driver
৭. ১টি arduino nano
৮. 3S LIPO Battery Charger
৯. 1100MAH 3S 25C LIPO BATTERY

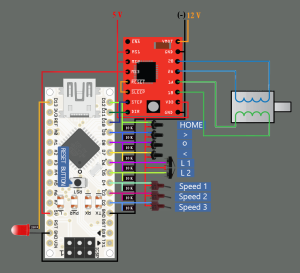
প্রথমেই মোটর টিকে সুবিধা মত স্লাইডার লাগিয়ে মোটর ও তার বিপরিত পাশে টাইমার পুলি লাগিয়ে তারপর টাইমার ফিতা লাগিয়ে ফেলতে হবে, বেজটাকে ফিতার সাথে সংযুক্ত করে দেখতে হবে ফিতা চলাচলে কোন প্রকার সমস্যা আছে নাকি। এবার ২ প্রান্তে Limit switch লাগিয়ে ফেলতে হবে। তারপর পছন্দ মত বক্সে ডায়াগ্রাম অনুসারে সব কিছু লাগিয়ে ঠিক মত সংযোগ দিতে হবে। ডায়াগ্রামে সংযোগ প্রক্রিয়া বিস্তারিত ভাবে ছবিতে দেওয়া আছে।

সামনে যেতে [>]
পিছনে যেতে [<]
থামতে [0]
শুরুতে ফিরে যেতে [Home]
Speed নিয়ন্ত্রণের জন্য Speed1, Speed2, Speed3 (code পরিবর্তন করে ইচ্ছা মত Speed এ চালানো যাবে)
বেজ শুরুতে ও শেষে থামতে L1, L2 বাটন ব্যবহার হয়েছে।

1100MAH 3S 25C LIPO BATTERY ব্যবহার করা হয়েছে এবং এটি charge করতে 3S LIPO Battery Charger দরকার হবে।
এবার arduino nano তে code upload করলেই হয়ে যাবে, code সম্পর্কে ভালো ধারনা থাকেলে নিজেই code পরিবর্ত বা বানিয়ে নিতে পারেন।
Arduino Code
| int i = 0; int steps = 500; int timeDelay = 0;/*===== State =====*/ bool IsRunning_state = false; bool Direction_state_Forward = false; bool Direction_state_Backward = false;/*===== Pin Declearation =====*/int start_pin = 7; int stop_pin = 8; int home_pin = 12;int lim_forward = 5; int lim_backward = 6;int speed_1_pin = 2; int speed_2_pin = 3; int speed_3_pin = 4;int change_dir_pin = 9; int direction_pin = 11; int pulse_pin = 10;int running_LED_pin = 13;/*===== 0 =====*/ void setSliderSpeed() {if(digitalRead(speed_1_pin) == HIGH) { if(digitalRead(speed_2_pin) == HIGH) timeDelay = 50; if(digitalRead(speed_3_pin) == HIGH) timeDelay = 100; } } digitalWrite(10, HIGH); void goBackward() {
void setup() { pinMode(start_pin, INPUT);//Start } void loop() { //goForward(); if(digitalRead(start_pin) == HIGH) { IsRunning_state = true; if(digitalRead(change_dir_pin) == HIGH) IsRunning_state = true; } if(digitalRead(stop_pin) == HIGH) IsRunning_state = false; } if(digitalRead(home_pin) == HIGH) IsRunning_state = true; { break; goBackward(); digitalWrite(running_LED_pin, LOW); /* **** **** *** */ if(IsRunning_state == true) setSliderSpeed(); Direction_state_Forward = true; else { } // b side limit if(digitalRead(lim_forward) == true) //digitalWrite(running_LED_pin, LOW); if(digitalRead(lim_backward) == true) digitalWrite(running_LED_pin, LOW); |
পরিশিষ্ট:
এই প্রজেক্ট টি মূলত তাদের জন্যই যারা নিজের জীনিস নিজে তৈরী করতে পচ্ছন্দ করেন।
তবে Professional কাজের জন্য ভাল মানের slider এর কোন বিকল্প নেই । আমাদের চ্যানেল এ যে slider টি ব্যবহার করা হয় তা হচ্ছে iFootage Shark Slider Mini যা Buyslider.com থেকে 1800 euro খরচ করে আনা হয়েছে।
এটি যথেষ্ট Portable এবং customizable.